|
Darknet/YOLO v6.0-37-gb57f9029
Object Detection Framework
|

|
|
Darknet/YOLO v6.0-37-gb57f9029
Object Detection Framework
|
|
This application will process one or more videos as fast as possible using multiple threads and save a new output video to disk. More...

Classes | |
| struct | Frame |
| Everything we know about a specific video frame is stored in one of these objects. More... | |
Functions | |
| void | detection_thread (size_t &total_objects_found) |
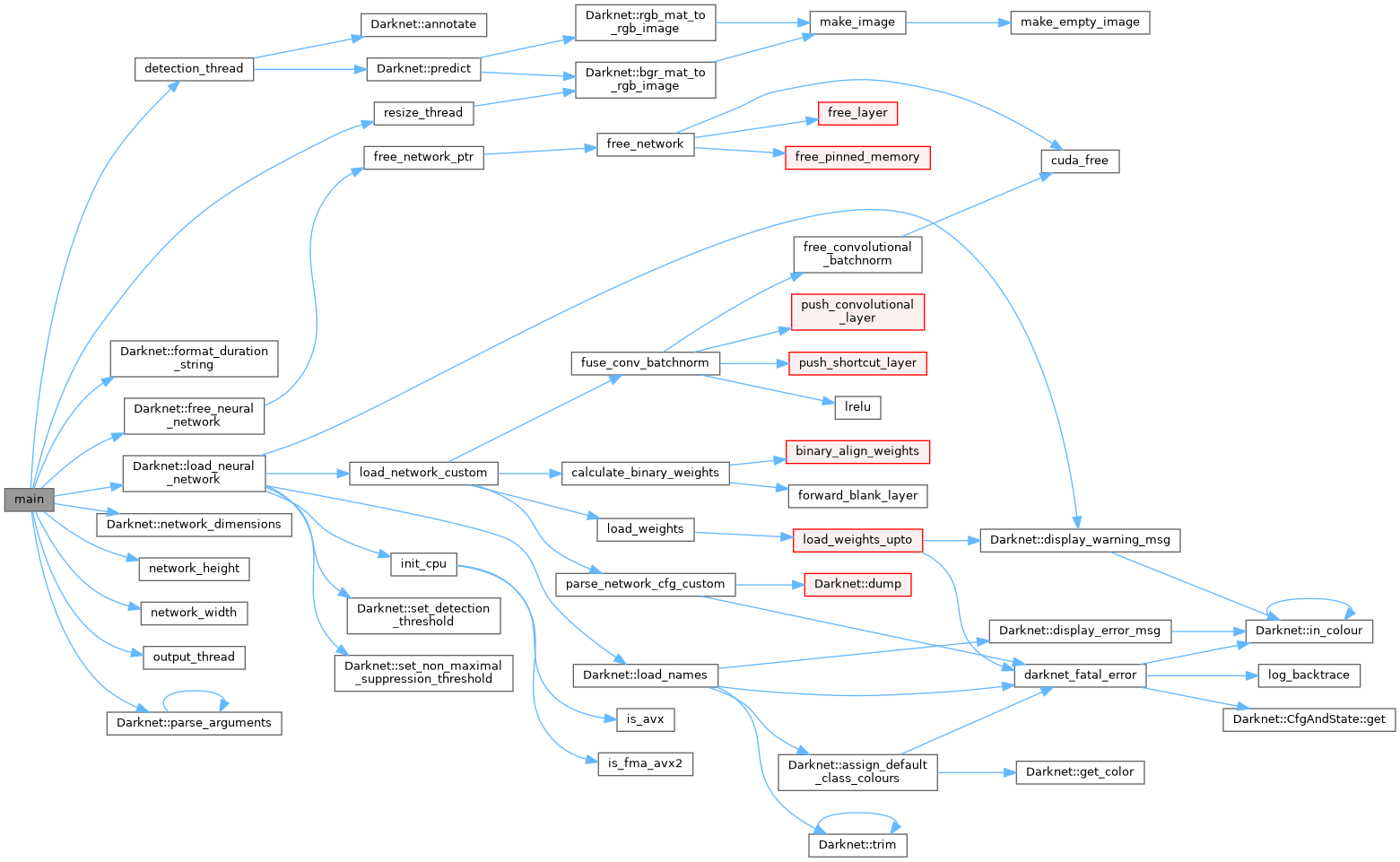
| int | main (int argc, char *argv[]) |
| void | output_thread (cv::VideoWriter &out) |
| void | resize_thread () |
Variables | |
| bool | all_threads_must_exit = false |
if something goes wrong, this flag gets set to true | |
| size_t | expected_next_index = 0 |
| keep track of which frame has been written to disk | |
| std::set< Frame > | frames_waiting_for_output |
| once a frame has been predicted, it is stored here | |
| std::set< Frame > | frames_waiting_for_prediction |
| once a frame has been resized, it is stored here | |
| std::set< Frame > | frames_waiting_for_resize |
| once a frame is read from the video, it is stored here | |
| Darknet::NetworkPtr | net = nullptr |
| Darknet/YOLO neural network pointer. | |
| cv::Size | network_dimensions |
| dimensions of the neural network that was loaded | |
| size_t | output_thread_starved = 0 |
| std::chrono::high_resolution_clock::duration | output_work_duration |
| amount of time spent on the output video | |
| size_t | predict_thread_starved = 0 |
| std::chrono::high_resolution_clock::duration | predict_work_duration |
| amount of time spent predicting frames | |
| size_t | reader_must_pause = 0 |
| std::chrono::high_resolution_clock::duration | reader_work_duration |
| amount of time spent reading frames | |
| size_t | resize_thread_starved = 0 |
| std::chrono::high_resolution_clock::duration | resize_work_duration |
| amount of time spent resizing frames | |
| std::chrono::high_resolution_clock::duration | wait_threads_duration |
| amount of time spent waiting for other threads to finish running | |
| std::mutex | waiting_for_output |
| mutex to protect access to frames_waiting_for_output | |
| std::mutex | waiting_for_prediction |
| mutex to protect access to frames_waiting_for_prediction | |
| std::mutex | waiting_for_resize |
| mutex to protect access to frames_waiting_for_resize | |
| size_t | waiting_for_threads = 0 |
This application will process one or more videos as fast as possible using multiple threads and save a new output video to disk.
The results are not shown to the user. Call it like this:
darknet_05_process_videos_multithreaded LegoGears DSCN1582A.MOV
The output should be similar to this:
processing DSCN1582A.MOV: -> total number of CPUs ..... 16 -> threads for this video ... 4 -> neural network size ...... 224 x 160 x 3 -> input video dimensions ... 640 x 480 -> input video frame count .. 1230 -> input video frame rate ... 29.970030 FPS -> input video length ....... 41041 milliseconds -> output filename .......... DSCN1582A_output.m4v -> total frames processed ... 1230 -> time to process video .... 1719 milliseconds -> processed frame rate ..... 715.532286 FPS -> total objects found ...... 6189 -> average objects/frame .... 5.031707
| void detection_thread | ( | size_t & | total_objects_found | ) |


| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
MJPG .avi -> simple, widely supported, creates large files XVID .avi -> generic, widely used, creates large files DIVX .avi -> similar to xvid H264 .mp4 -> high efficiency, small files, requires ffmpeg? X264 .mp4 -> high efficiency, small files, requires ffmpeg? avc1 .mp4 -> high efficiency, small files, requires ffmpeg? MP4V .mp4 -> common, large files, what Darknet/YOLO used up until v5.x PIM1 .avi -> older, universalDarknet/YOLO used to create .m4v files with the fourcc value "mp4v". Turns out that .m4v is an Apple-specific extension. In V6+, the file extension was changed to .mp4, and the fourcc was changed to "avc1". This creates much smaller video files than the previous setting.
Also note that the higher the compression, the longer it takes to encode the video. Remember to modify the output filename above if you are trying different fourcc values.
| void output_thread | ( | cv::VideoWriter & | out | ) |

| void resize_thread | ( | ) |


| bool all_threads_must_exit = false |
if something goes wrong, this flag gets set to true
| size_t expected_next_index = 0 |
keep track of which frame has been written to disk
| std::set<Frame> frames_waiting_for_output |
once a frame has been predicted, it is stored here
| std::set<Frame> frames_waiting_for_prediction |
once a frame has been resized, it is stored here
| std::set<Frame> frames_waiting_for_resize |
once a frame is read from the video, it is stored here
| Darknet::NetworkPtr net = nullptr |
Darknet/YOLO neural network pointer.
| cv::Size network_dimensions |
dimensions of the neural network that was loaded
| size_t output_thread_starved = 0 |
| std::chrono::high_resolution_clock::duration output_work_duration |
amount of time spent on the output video
| size_t predict_thread_starved = 0 |
| std::chrono::high_resolution_clock::duration predict_work_duration |
amount of time spent predicting frames
| size_t reader_must_pause = 0 |
| std::chrono::high_resolution_clock::duration reader_work_duration |
amount of time spent reading frames
| size_t resize_thread_starved = 0 |
| std::chrono::high_resolution_clock::duration resize_work_duration |
amount of time spent resizing frames
| std::chrono::high_resolution_clock::duration wait_threads_duration |
amount of time spent waiting for other threads to finish running
| std::mutex waiting_for_output |
mutex to protect access to frames_waiting_for_output
| std::mutex waiting_for_prediction |
mutex to protect access to frames_waiting_for_prediction
| std::mutex waiting_for_resize |
mutex to protect access to frames_waiting_for_resize
| size_t waiting_for_threads = 0 |